GPU编程学习笔记
CS 179: GPU Programming (caltech.edu)
基本概念
简单的例子
GPU的特点:允许我们同时运行数千个线程(实际的情况是这些线程并非真的同时运行,只是它们之间上下文切换的开销很小)。
GPU执行计算的通常流程:
- 在主机(CPU可直接访问的内存)上设置输入
- 在主机上为输出分配内存
- 在GPU上为输入分配内存
- 在GPU上为输出分配内存
- 将输入从主机复制到GPU(慢)
- 启动GPU内核(快)
- 将输出从GPU复制到主机(慢)
注意:复制操作可以是异步的,而且有统一内存管理可用。
未使用统一内存管理:
#include <stdio.h>
#include <cuda_runtime.h>
__global__ void vectorAdd(const float *A, const float *B, float *C, int numElements)
{
int i = blockDim.x * blockIdx.x + threadIdx.x;
if (i < numElements)
{
C[i] = A[i] + B[i];
}
}
int main()
{
int numElements = 50000;
size_t size = numElements * sizeof(float);
float *h_A = (float *)malloc(size);
float *h_B = (float *)malloc(size);
float *h_C = (float *)malloc(size);
float *d_A, *d_B, *d_C;
cudaMalloc((void **)&d_A, size);
cudaMalloc((void **)&d_B, size);
cudaMalloc((void **)&d_C, size);
cudaMemcpy(d_A, h_A, size, cudaMemcpyHostToDevice);
cudaMemcpy(d_B, h_B, size, cudaMemcpyHostToDevice);
vectorAdd<<<10, 5000>>>(d_A, d_B, d_C, numElements);
cudaMemcpy(h_C, d_C, size, cudaMemcpyDeviceToHost);
cudaFree(d_A);
cudaFree(d_B);
cudaFree(d_C);
free(h_A);
free(h_B);
free(h_C);
return 0;
}
使用统一内存管理并自动拷贝:
#include <stdio.h>
#include <cuda_runtime.h>
__global__ void vectorAdd(float *A, float *B, float *C, int numElements)
{
int i = blockDim.x * blockIdx.x + threadIdx.x;
if (i < numElements)
{
C[i] = A[i] + B[i];
}
}
int main()
{
int numElements = 50000;
size_t size = numElements * sizeof(float);
float *h_A, *h_B, *h_C;
cudaMallocManaged(&h_A, size);
cudaMallocManaged(&h_B, size);
cudaMallocManaged(&h_C, size);
vectorAdd<<<10, 5000>>>(h_A, h_B, h_C, numElements);
cudaDeviceSynchronize();
cudaFree(h_A);
cudaFree(h_B);
cudaFree(h_C);
return 0;
}
手动预取:
#include <stdio.h>
#include <cuda_runtime.h>
__global__ void vectorAdd(float *A, float *B, float *C, int numElements)
{
int i = blockDim.x * blockIdx.x + threadIdx.x;
if (i < numElements)
{
C[i] = A[i] + B[i];
}
}
int main()
{
int numElements = 50000;
size_t size = numElements * sizeof(float);
float *h_A, *h_B, *h_C;
cudaMallocManaged(&h_A, size);
cudaMallocManaged(&h_B, size);
cudaMallocManaged(&h_C, size);
// Prefetch data to GPU device
cudaMemPrefetchAsync(h_A, size, 0); // 0 is the device ID for the GPU
cudaMemPrefetchAsync(h_B, size, 0);
cudaMemPrefetchAsync(h_C, size, 0);
vectorAdd<<<10, 5000>>>(h_A, h_B, h_C, numElements);
// Prefetch data back to CPU
cudaMemPrefetchAsync(h_C, size, cudaCpuDeviceId);
cudaDeviceSynchronize();
cudaFree(h_A);
cudaFree(h_B);
cudaFree(h_C);
return 0;
}
异步数据复制:
#include <stdio.h>
#include <cuda_runtime.h>
__global__ void vectorAdd(const float *A, const float *B, float *C, int numElements)
{
int i = blockDim.x * blockIdx.x + threadIdx.x;
if (i < numElements)
{
C[i] = A[i] + B[i];
}
}
int main()
{
int numElements = 50000;
size_t size = numElements * sizeof(float);
float *h_A = (float *)malloc(size);
float *h_B = (float *)malloc(size);
float *h_C = (float *)malloc(size);
// Initialize host memory
for (int i = 0; i < numElements; ++i) {
h_A[i] = i;
h_B[i] = i;
}
float *d_A, *d_B, *d_C;
cudaMalloc((void **)&d_A, size);
cudaMalloc((void **)&d_B, size);
cudaMalloc((void **)&d_C, size);
// Create a stream
cudaStream_t stream;
cudaStreamCreate(&stream);
// Asynchronously copy data to GPU
cudaMemcpyAsync(d_A, h_A, size, cudaMemcpyHostToDevice, stream);
cudaMemcpyAsync(d_B, h_B, size, cudaMemcpyHostToDevice, stream);
// Launch kernel in the same stream
vectorAdd<<<10, 5000, 0, stream>>>(d_A, d_B, d_C, numElements);
// Asynchronously copy data back to host
cudaMemcpyAsync(h_C, d_C, size, cudaMemcpyDeviceToHost, stream);
// Wait for the stream to finish
cudaStreamSynchronize(stream);
// Clean up
cudaFree(d_A);
cudaFree(d_B);
cudaFree(d_C);
cudaStreamDestroy(stream);
free(h_A);
free(h_B);
free(h_C);
return 0;
}
基本概念
一些基本的概念:
- CUDA:Nvidia的类C++编程语言,用于编程图形处理单元(GPU)。
- nvcc:nVidia CUDA编译器。
- SM:流多处理器(Streaming Multiprocessor)。
- SIMT计算:单指令,多线程(Single Instruction, Multiple Threads)
- 线程(Threads) - 一个执行线程是被编程的指令中的最小序列,可以由一个调度器(scheduler)独立管理,这通常是操作系统的一部分。
- 线程块(Blocks) - 线程块是一个编程抽象,代表一组可以串行或并行执行的线程。
- 网格(Grids) - 编程抽象,代表所有线程块。
- Warp(线束) - 在硬件上,一个线程块是由“warps”组成的。一个warp是一个线程块中的32个线程,线程块以warp为单位执行;一个warp中所有线程都执行相同的指令。这些线程被SM串行地选择。
- Warp分歧(Warp Divergence) - 所有线程通常必须执行相同的代码(if-then-else);假如某些线程需要执行不同的分支,则这些分支将会顺序执行。
- 每个线程块都在一个SM上完整地执行,但是一个SM可以同时执行多个线程块,具体数量取决于资源(如寄存器、共享内存等)的可用性。
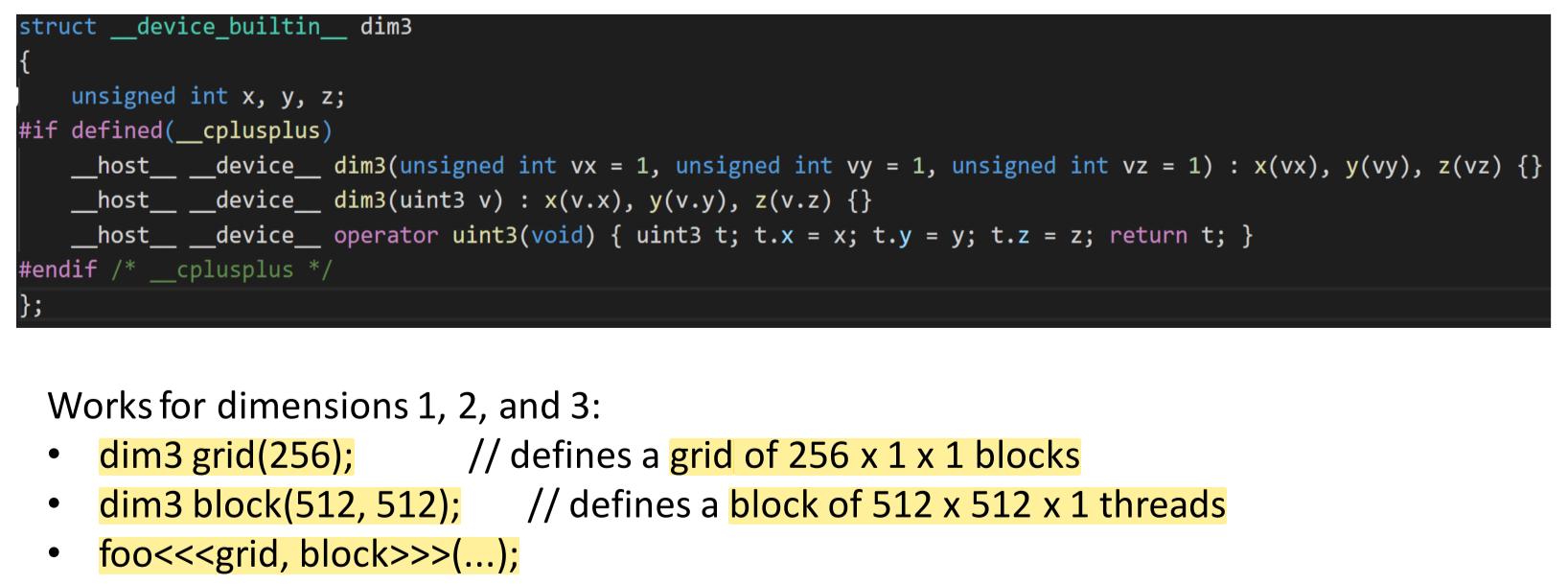
对于许多涉及数组的可并行化问题,考虑多维数组是必要的。我们希望为多维对象分配唯一的线程索引。因此,CUDA提供了内置的多维(最高3维)线程索引功能,这是通过一个名为dim3的结构体实现的。
一些题外话:SIMD vs. SIMT
SIMD:
- SIMD描述了一类指令,这些指令可以同时对多个寄存器执行相同的操作。
- 示例:将某标量加到3个寄存器上,将每次加法的输出存储在这些寄存器中。
- 用于增加像素的亮度。
- CPU也有SIMD指令,对于需要进行大量数值计算的应用非常重要。
-
视频编解码器,如x264/x265,大量使用SIMD指令来加速视频的编码和解码。
- 将算法转换为使用SIMD通常被称为“向量化”。
- 并不是所有的算法都能从中受益或者完全被向量化。
- 使用SIMD指令并不总是有益的。
- 即使使用SIMD硬件也需要额外的功率,从而产生浪费的热量。
- 如果收益很小,那么可能不值得增加额外的复杂性。
- 优化编译器如GCC和LLVM仍在被训练,以能够有用地向量化代码,尽管在过去的2年里这一领域已经有了许多令人兴奋的发展,并且是一个活跃的研究领域。
- Polly LLVM 官网
SIMT:
领域:计算机科学与并行计算
翻译:
- CUDA的计算模型使用的是SIMD的一个较为宽松的扩展。
- 关键区别:
- 单指令,多寄存器集。
- 浪费了一些寄存器,但主要是为了满足以下两点。
- 单指令,多地址(即并行内存访问)
- 内存访问冲突!我们将在下周讨论。
- 单指令,多流程路径(即允许使用if语句)
- 引入了速度降低,称为“线程束分歧”。
- 单指令,多寄存器集。
- 关键区别:
值得一提的是GPU的一些硬件限制:
- 每个块的最大线程数通常是512或1024,具体取决于机器。
- 每个网格的最大线程块数通常是65535。
- 如果你超过了这些数字,你的GPU可能会报错或输出垃圾数据。
- GPU编程的很大一部分是处理这种硬件限制。
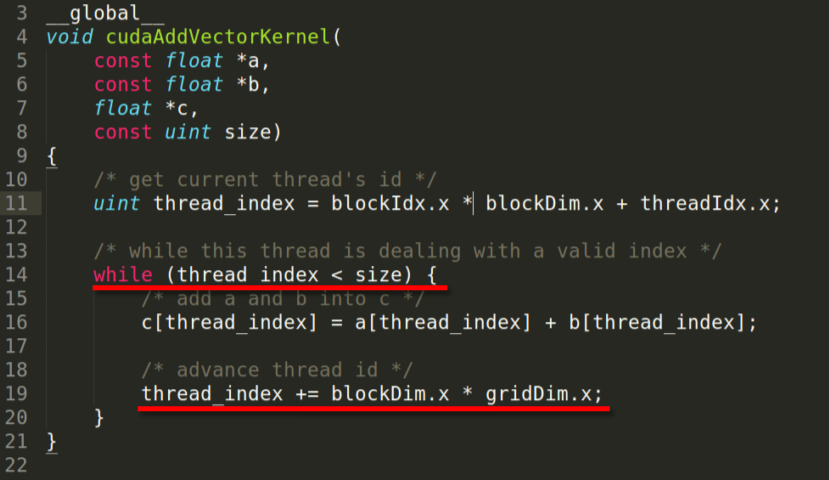
- 这种限制也意味着kernel必须补偿可能没有足够的线程单独分配给数据的事实。
CUDA程序优化
访存优化
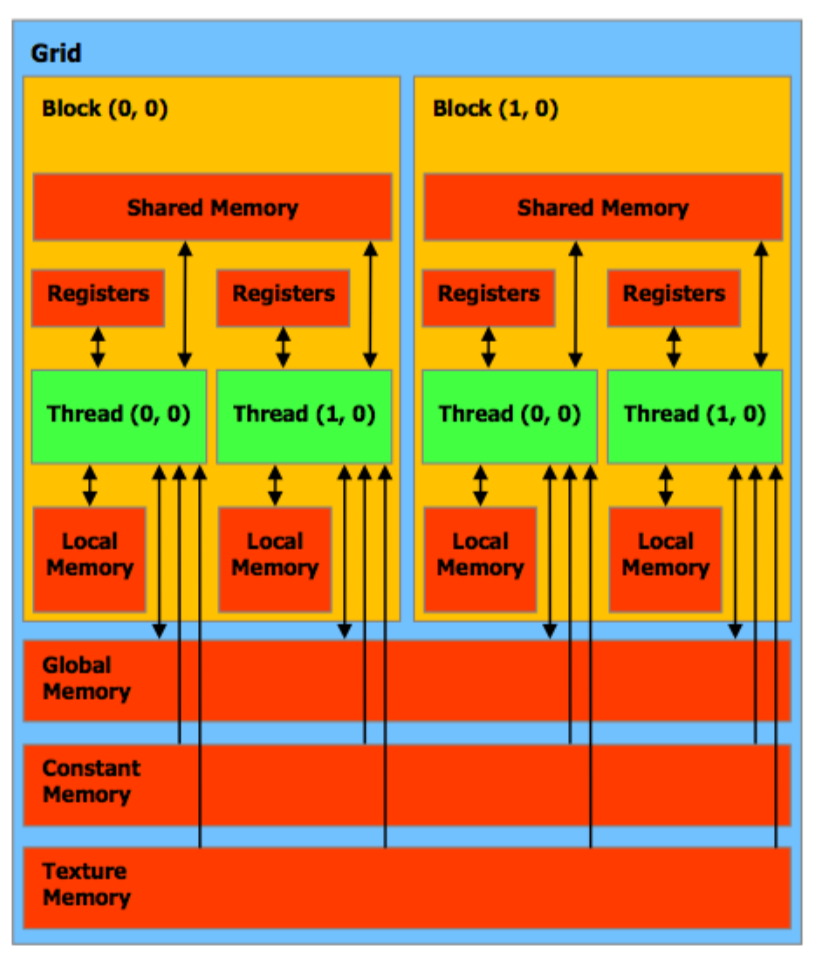
GPU内存层级中,特殊之处在于存在共享内存(shared memory)
共享内存:被创建它的块中的任何线程访问。它的生命周期与块相同。当没有bank冲突或从不同线程从相同地址写入数据时,它的速度可以与寄存器一样快。
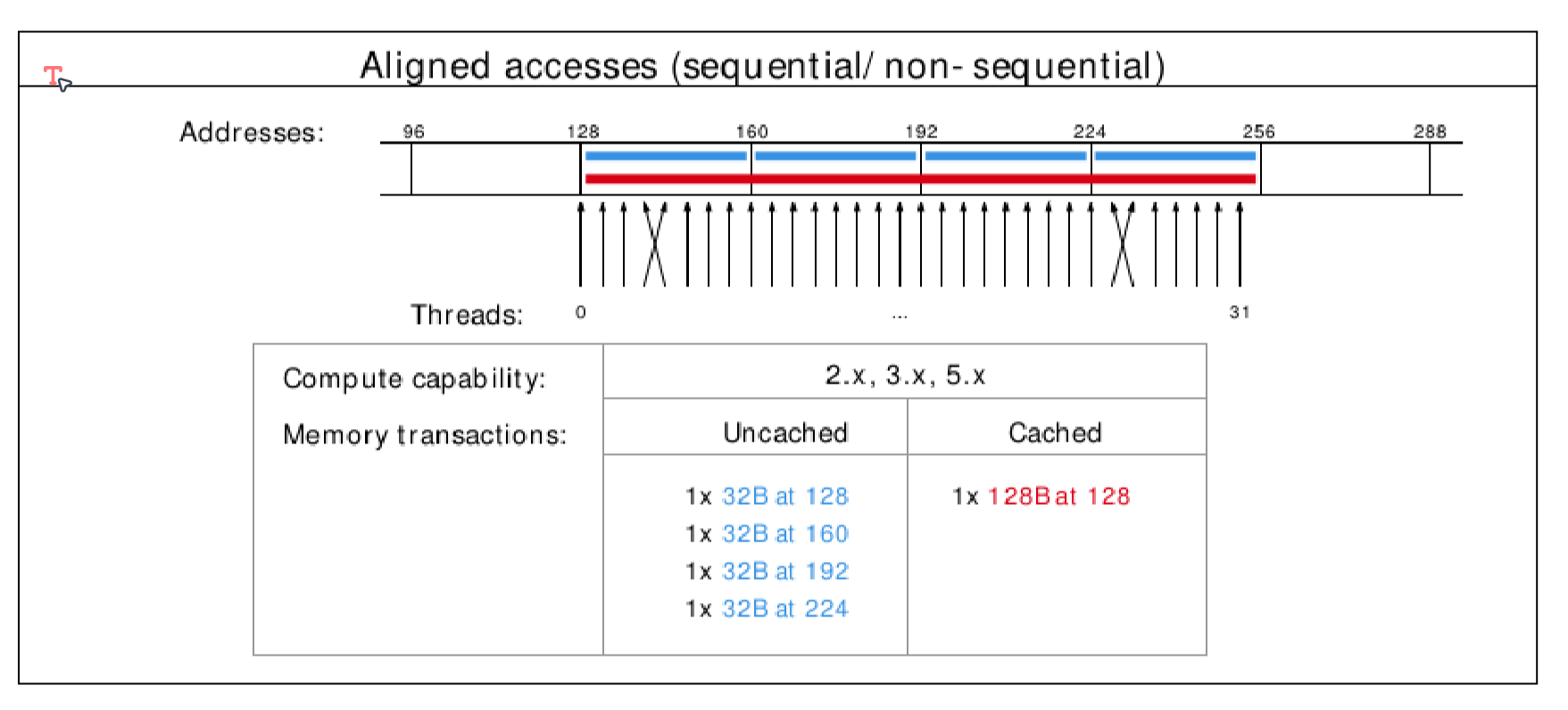
全局内存:全局内存IO是GPU上最慢的IO形式(更慢的可能是访问主机内存)。正因为如此,我们希望尽可能少地访问全局内存。一种与GPU硬件相容性好的访问模式被称为合并内存访问。
- 一组内存访问通过一次内存事务来完成
- 合并内存访问最小化了通过这些内存事务读入的缓存行数量
- GPU的缓存行是128字节并且是对齐的
- 因此假如对全局内存的访问是128字节对齐的话,效率会高得多

共享内存:
- 位于SM中的非常快速的内存
- 与L1缓存相同的硬件
- 延迟大约为~5ns
- 最大大小约为~48KB(根据GPU而异)
- 共享内存的可见范围是线程块
- 可以静态地分配共享内存(编译时已知大小)或动态地分配(直到运行时才知道大小)。
- 静态分配语法:
__shared__ float data[1024];- 在内核中声明,主机代码中无任何内容。
- 动态分配语法:
- 主机:
kernel<<<grid_dim, block_dim, numBytesShMem>>>(args);
- 设备(在内核中):
extern __shared__ float s[];
- 主机:
一个使用共享内存的例子:
- 任务:计算字节频率计数
- 输入:长度为n的字节数组
- 输出:包含每个字节出现次数的256个元素的整数数组
朴素方法:在全局内存中更新结果,n次全局存储
聪明方法:在共享内存中更新结果,最后复制到全局内存;每个线程块256次全局存储。
流程:
- 从全局内存复制到共享内存
- syncthreads()
- 执行计算,逐步在共享内存中输出,并在必要时调用__syncthreads()
- 将输出从共享内存复制到全局内存中的输出数组
共享内存被设置为32个bank
- 如果你将共享内存划分为4字节长的元素,那么元素i位于bank i % 32中。
-
当一个warp中的2个线程访问同一bank的不同元素时,会发生bank冲突。
- bank冲突导致串行内存访问而不是并行。
解决方法:
- 跨度1 ⇒ 32个线程分别访问bank 0, 1, 2, …, 31,没有冲突
- 跨度2 ⇒ 32个线程分别访问bank 0, 2, 4, .. , 30, 0, 2, 4, …;2路bank冲突
- 跨度3 ⇒ 无冲突
- 跨度4 ⇒ 4路bank冲突
- …
- 跨度32 ⇒ 32路bank冲突
(n路冲突,n=gcd(stride, 32))
为了解决跨度32的情况,我们将浪费一个字节进行填充,使跨度变为33。
同步与并行
前面提到了线程同步;通常使用__syncthreads()函数来同步一个块内的线程
- 仅在块级别起作用
- SMs (流多处理器) 是相互独立的,不能实现线程块之间的同步
- 与C/C++中的
barrier()函数相似 - 对于使用共享内存的内核,
__synchthreads()调用非常有用。
此外还有原子操作,用来避免多个线程同时对某个数据进行操作:
CUDA 提供了内置的原子操作。
- 使用函数:
atomic<op>(float *address, float val); - 将
<op>替换为:Add、Sub、Exch、Min、Max、Inc、Dec、And、Or、Xor 中的一个。 - 例如,使用
atomicAdd(float *address, float val)进行原子加法操作。
如果你想通过将数字加到一个初始值为0的变量来累加N个数,你必须一次加一个数;但不要这么做,更优的做法是:
-
使用共享内存在一个块内求和
-
每个线程块求和后,在全局内存中执行一次的atomicAdd操作。
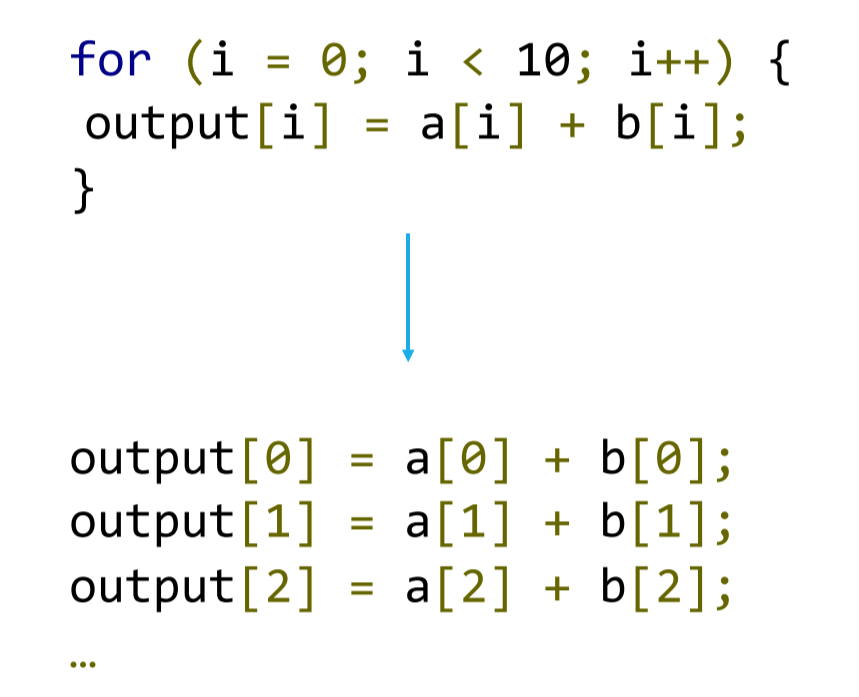
指令级(ILP)并行性是当你避免因指令依赖性而引起的性能损失时的情况。
方法:循环展开
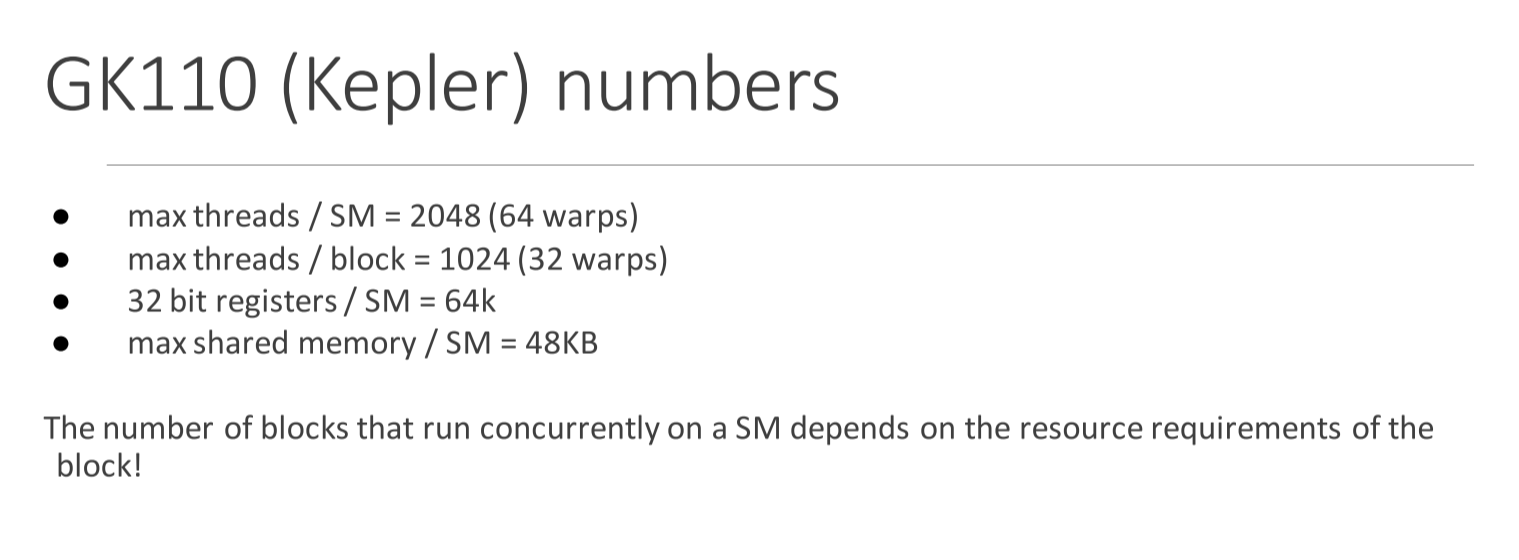
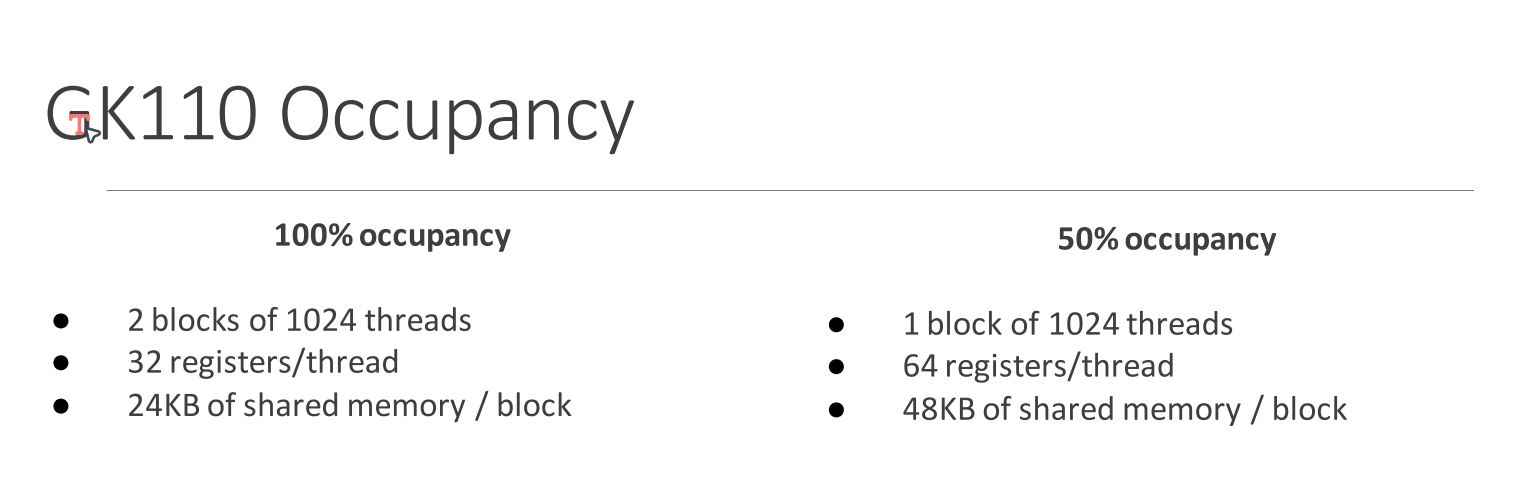
GPU占用率
为什么占用率很重要?因为每个流多处理器(SM)需要足够的独立线程来隐藏延迟
- 指令延迟
-
内存访问延迟
- 占用率 = 每个SM上的活动warp数 / 每个SM的最大warp数
决定每个SM能够容纳的线程数(即每个SM的最大warp数)是由GPU的硬件资源所决定的。线程/块很重要,因为它(结合块的数量)告诉我们SM上有多少warp。
什么情况下,更高的占用率可以提高性能?
- 每个线程有更多的独立工作(无需与其他线程交互、无需读写内存) -> 需要的占用率较低
- 访存密集的代码往往需要更高的占用率——需要更多的工作来隐藏它。
本章总结
- 并行优化
- 隐藏延迟:提高占用率
- 指令级并行(ILP):循环展开
- warp内的线程执行一致性
- 访存优化
- 全局内存:
- 读:合并访存;
- 写:在共享内存中提前规约;
- 共享内存:避免bank冲突
- 全局内存:
一些值得注意的点
cuda是如何将block里面的线程分为warp的?
线程在它们所属的线程块内有一个唯一的线程ID。通常情况下,一个线程块中的前32个线程(线程ID 0到31)会被组织成一个warp,接下来的32个线程(线程ID 32到63)会被组织成下一个warp,依此类推。
那线程id是如何计算的? \(\text{ThreadID}_{\text{block}} = \text{threadIdx}.x + \text{threadIdx}.y \cdot \text{blockDim}.x + \text{threadIdx}.z \cdot \text{blockDim}.x \cdot \text{blockDim}.y\) 所以实际上,z表示表号,y表示行号,x表示列号,和直觉上的判断正好相反
知道如何划分warp是相当有用的,可以帮助我们识别访存模式(合并访存、避免bank冲突etc.)
高性能Transpose算子
- shared memory:-60%
- avoid bank conflict: -10%
- ILP: -10%
__global__
void shmemTransposeKernel(const float *input, float *output, int n) {
// TODO: Modify transpose kernel to use shared memory. All global memory
// reads and writes should be coalesced. Minimize the number of shared
// memory bank conflicts (0 bank conflicts should be possible using
// padding). Again, comment on all sub-optimal accesses.
// input [j : j + 4, i] -> [block_j * 4 : block_j * 4 + 3, block_i]
// output [i, j : j + 4] -> [block_i, block_j * 4 : block_j * 4 + 3]
__shared__ float shared_input[64 * 64];
__shared__ float shared_output[65 * 64];
// int i = threadIdx.x + 64 * blockIdx.x;
// int j = 4 * threadIdx.y + 64 * blockIdx.y;
int block_i0 = 64 * blockIdx.x;
int block_j0 = 64 * blockIdx.y;
int block_i = threadIdx.x;
int block_j = threadIdx.y * 4;
for (; block_j < threadIdx.y * 4 + 4; block_j++) {
shared_input[block_i + 64 * block_j] = input[block_i0 + block_i + n * (block_j0 + block_j)];
shared_output[block_j + 65 * block_i] = shared_input[block_i + 64 * block_j];
}
__syncthreads();
block_i0 = 64 * blockIdx.y;
block_j0 = 64 * blockIdx.x;
block_i = threadIdx.x;
block_j = threadIdx.y;
for (; block_j < threadIdx.y * 4 + 4; block_j++) {
output[block_i0 + block_i + n * (block_j0 + block_j)] = shared_output[block_i + 65 * block_j];
}
}
加入循环展开(收益不大)
__global__
void optimalTransposeKernel(const float *input, float *output, int n) {
// TODO: This should be based off of your shmemTransposeKernel.
// Use any optimization tricks discussed so far to improve performance.
// Consider ILP and loop unrolling.
__shared__ float shared_output[64 * 64];
// int i = threadIdx.x + 64 * blockIdx.x;
// int j = 4 * threadIdx.y + 64 * blockIdx.y;
int block_i0 = 64 * blockIdx.x;
int block_j0 = 64 * blockIdx.y;
int block_i = threadIdx.x;
int block_j = threadIdx.y * 4;
float s0 = input[block_i0 + block_i + n * (block_j0 + block_j)];
float s1 = input[block_i0 + block_i + n * (block_j0 + block_j + 1)];
float s2 = input[block_i0 + block_i + n * (block_j0 + block_j + 2)];
float s3 = input[block_i0 + block_i + n * (block_j0 + block_j + 3)];
shared_output[block_j + 64 * block_i] = s0;
shared_output[block_j + 1 + 64 * block_i] = s1;
shared_output[block_j + 2 + 64 * block_i] = s2;
shared_output[block_j + 3 + 64 * block_i] = s3;
__syncthreads();
block_i0 = 64 * blockIdx.y;
block_j0 = 64 * blockIdx.x;
block_i = threadIdx.x;
block_j = threadIdx.y * 4;
float t0 = shared_output[block_i + 64 * (block_j)];
float t1 = shared_output[block_i + 64 * (block_j + 1)];
float t2 = shared_output[block_i + 64 * (block_j + 2)];
float t3 = shared_output[block_i + 64 * (block_j + 3)];
output[block_i0 + block_i + n * (block_j0 + block_j)] = t0;
output[block_i0 + block_i + n * (block_j0 + block_j + 1)] = t1;
output[block_i0 + block_i + n * (block_j0 + block_j + 2)] = t2;
output[block_i0 + block_i + n * (block_j0 + block_j + 3)] = t3;
}
GPU编程常用算法
规约
如果操作符满足以下条件,则它是一个规约操作符:
- 它可以将一个数组减少到一个标量值。 (例如,对数组的所有元素求和)。
-
最终结果应该可以从创建的部分任务的结果中获得。
- 满足这些要求的运算符包含整数加法、乘法以及一些逻辑运算符(与、或等)。
GPU专用算法大多面向规约问题。
数组求和问题
float sum = 0.0;
for (int i = 0; i < N; i++)
sum += A[i];
Naive implementation:
__global__ void cudaSum_atomic_kernel(const float* const inputs,
unsigned int numberOfInputs,
float* output) {
// 获取线程ID
unsigned int inputIndex = threadIdx.x + blockIdx.x * blockDim.x;
float partial_sum = 0.0;
// 每个线程处理一个特定的元素,由于使用了原子操作,所以不需要担心线程冲突
if(inputIndex < numberOfInputs) {
partial_sum = inputs[inputIndex];
atomicAdd(output, partial_sum);
}
}
想法:在共享内存中为每个线程存储部分和
- 我们可以在共享内存中累积每个块的部分和,然后用原子操作向全局累加器添加一阵个块的部分和。
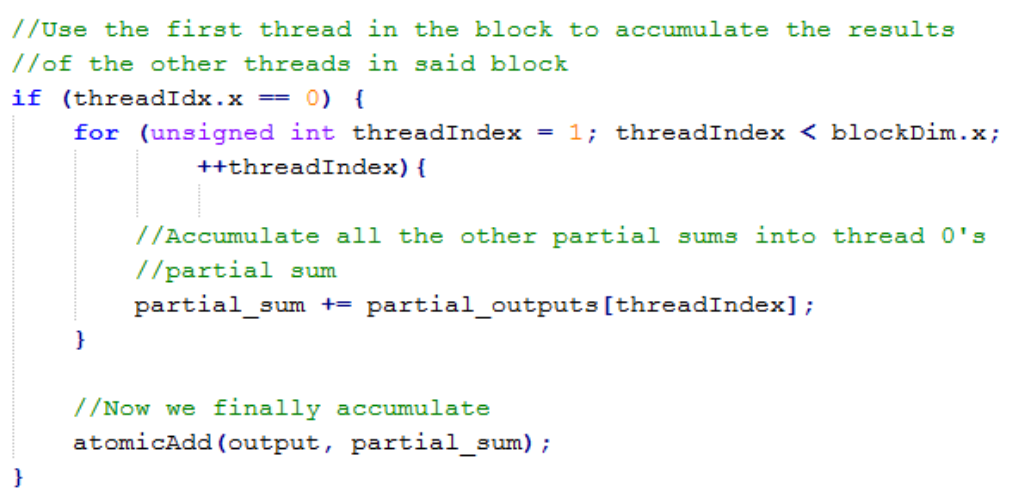
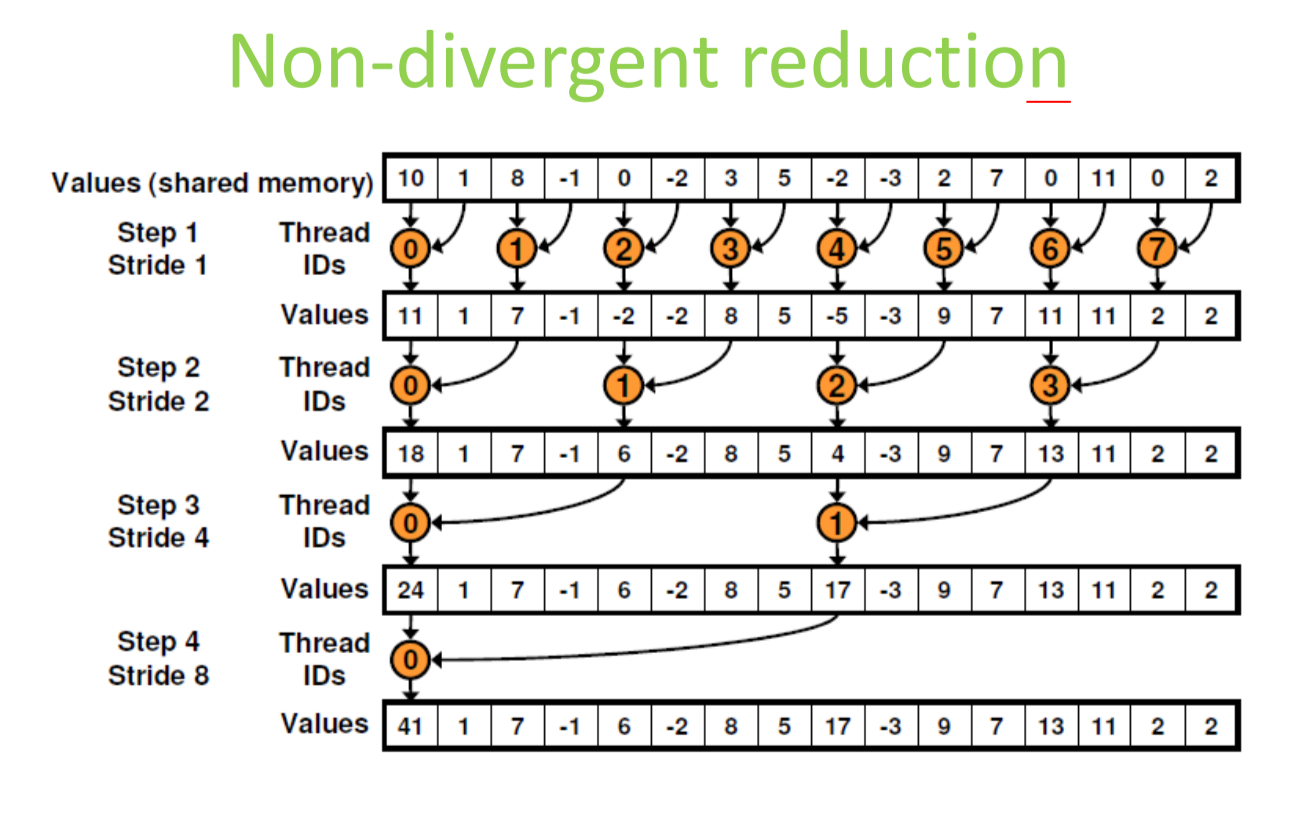
但是使用1个线程来计算整个块的部分和似乎不太高效;所以:
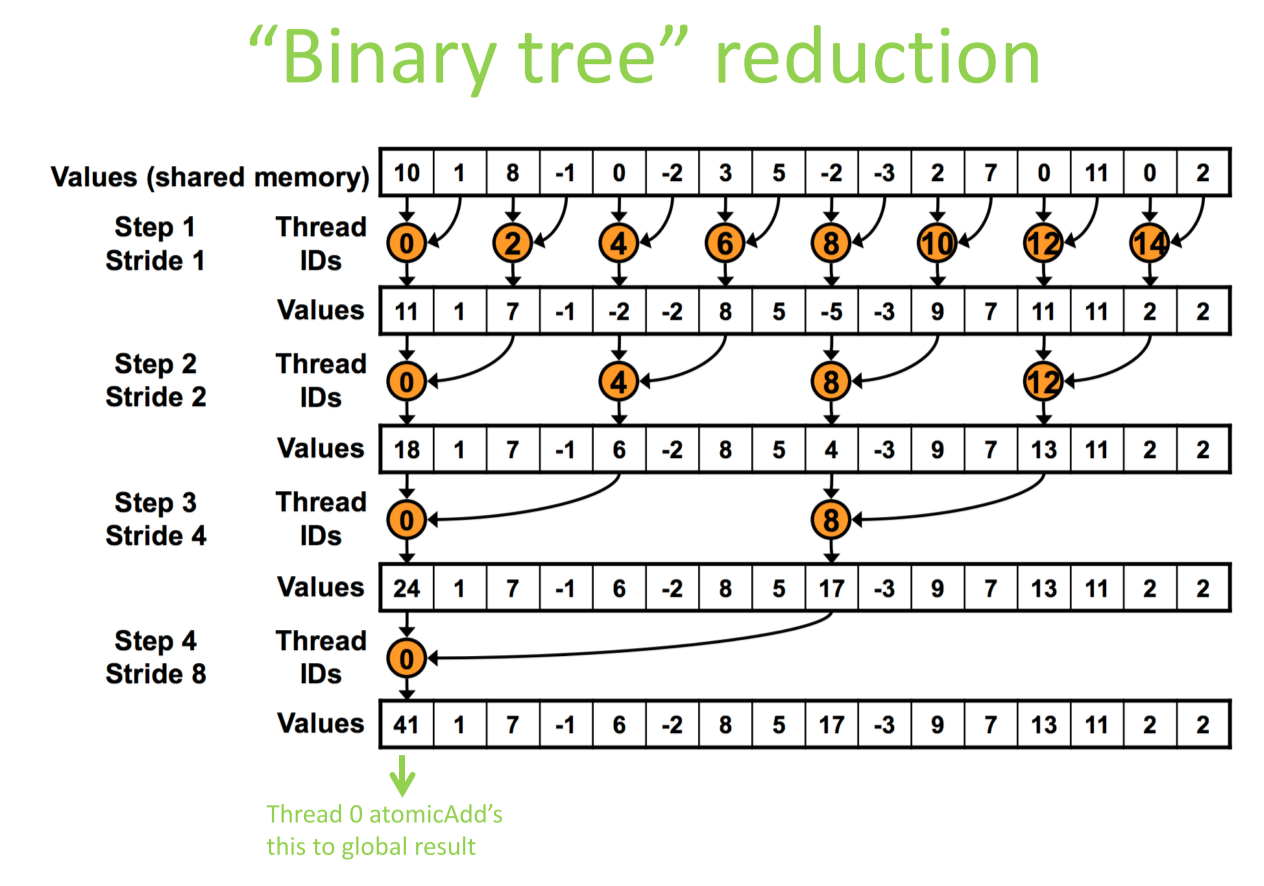
问题:线程发散;step 1只有一半的线程在执行,之后每次减少一半,到最后只有1个线程执行;大量线程空转
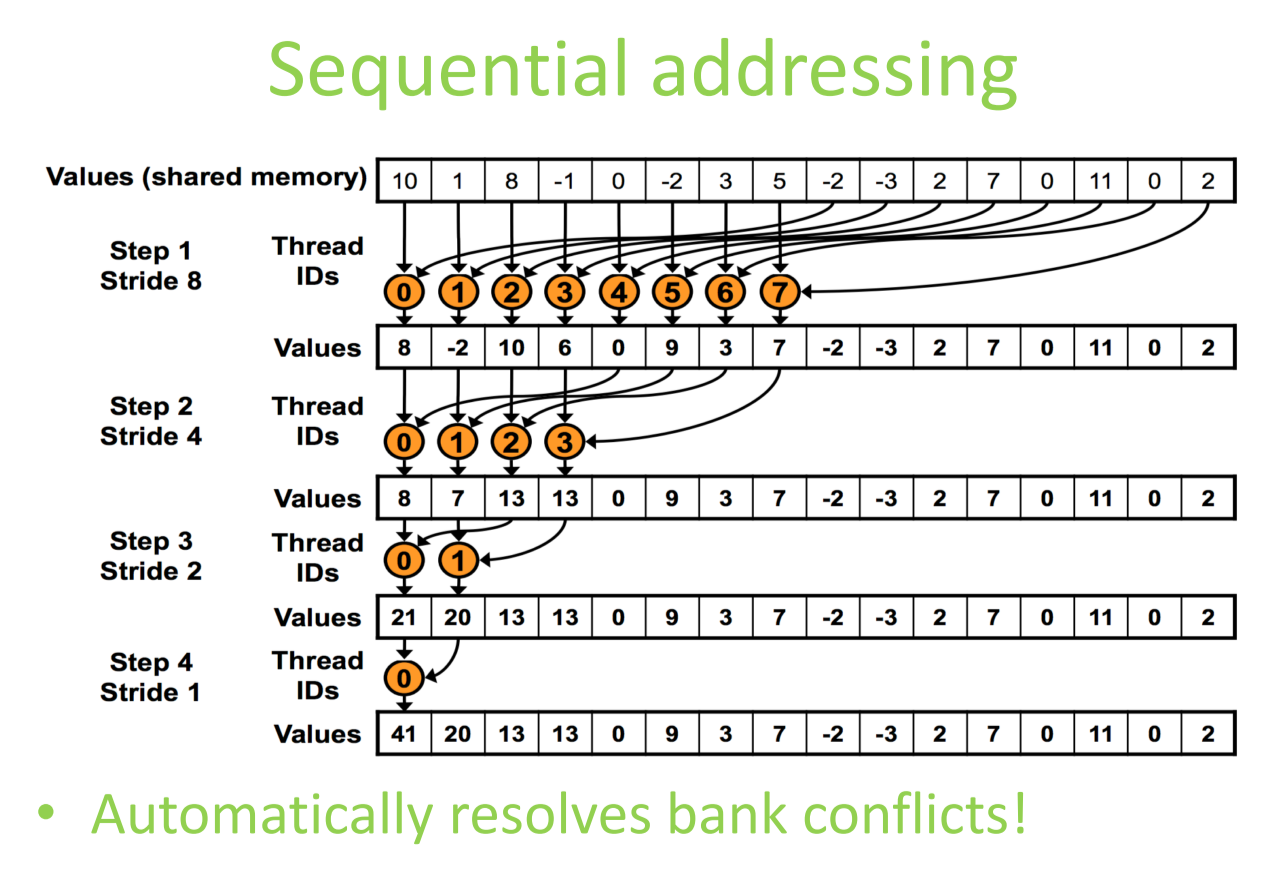
由于stride变成了1,还自动解决了bank冲突问题
最终代码:
__global__ void cudaSum_linear_kernel(const float* const inputs,
unsigned int numberOfInputs,
float* output) {
// 获取线程和块的ID
unsigned int tid = threadIdx.x;
unsigned int idx = blockIdx.x * blockDim.x + threadIdx.x;
// 声明共享内存
extern __shared__ float partial_outputs[];
// 计算部分和
float partial_sum = 0;
if(idx < numberOfInputs) {
partial_sum = inputs[idx];
}
partial_outputs[tid] = partial_sum;
// 同步确保所有线程都完成了数据加载到共享内存
__syncthreads();
// 进行归约操作,进行两两加法
for(int stride = blockDim.x / 2; stride > 0; stride >>= 1) {
if(tid < stride) {
partial_outputs[tid] += partial_outputs[tid + stride];
}
__syncthreads(); // 确保在继续下一次迭代之前所有的加法操作已完成
}
// 将每个块的结果写回到全局内存
if(tid == 0) {
atomicAdd(output, partial_outputs[0]);
}
}